alivesonline.com : นายฮิซาชิเกะ ทานากะ คือหนึ่งในผู้ก่อตั้งโตชิบาผู้ได้รับการขนานนามว่าเป็นนักประดิษฐ์อัจฉริยะ “คาราคุริ จิเอมอน” อัจฉริยภาพด้านหุ่นกลไกของเขา ซึ่งถือได้ว่าเป็นบรรพบุรุษของหุ่นยนต์ในเวลาต่อมา สามารถแสดงท่าทางการเคลื่อนไหวที่ซับซ้อนได้
ตัวอย่างเช่น หุ่นกลไก “ยูมิฮิคิโดจิ” อันโด่งดัง ซึ่งเป็นตุ๊กตารูปเด็กชายยิงธนูที่สามารถนำลูกดอกขึ้นทาบบนคันธนูและยิงลูกธนูไปยังเป้าหมายได้
ด้วยความคิดสร้างสรรค์และช่างประดิษฐ์นี้เองที่อยู่ในสายเลือดของโตชิบามาอย่างยาวนาน และยังเป็นเหตุผลว่าทำไมเราจึงมีความสนใจในการสร้างหุ่นยนต์ใหม่ ๆ ขึ้นมาตลอดประวัติศาสตร์อันยาวนานของบริษัท
ในสมัยของ คาราคุริ จิเอมอน หุ่นกลไกมนุษย์อาจจะเป็นสิ่งที่สร้างความตื่นเต้นและความบันเทิง แต่ในปัจจุบัน หุ่นยนต์ได้กลายเป็นสิ่งที่สร้างขึ้นเพื่อตอบโจทย์ความต้องการของสังคม พวกมันจึงต้องมีความสามารถในการช่วยแก้ไขปัญหาบางอย่างได้
ขณะนี้ เราได้ก้าวเข้าสู่ศตวรรษที่ 21 มาถึง 20 ปีแล้ว โตชิบาได้พัฒนา “คาราคุริ” หรือสร้างสรรค์จักรกลในรูปแบบใดเพื่อตอบสนองต่อความต้องการอันหลากหลายของสังคมสมัยใหม่บ้าง?
-
หุ่นยนต์อัจฉริยะและถิ่นที่อยู่
หนึ่งในปัญหาทางสังคมที่ประเทศญี่ปุ่นกำลังเผชิญอยู่ในขณะนี้คือปัญหาการขาดแคลนแรงงาน จำนวนประชากรวัยทำงานของญี่ปุ่นกำลังหดตัวลงจนทำให้การขาดแคลนแรงงานกลายเป็นวิกฤติทางสังคมในช่วงหลายปีที่ผ่านมา และถึงแม้ว่าหลายอุตสาหกรรมจะประสบปัญหาลักษณะเดียวกันนี้ แต่อุตสาหกรรมที่ได้รับผลกระทบหนักกว่าใครคืออุตสาหกรรมโลจิสติกส์ จนเกิดเป็นวลีว่า “ลอจิสติกส์ล่มสลาย” ที่ชวนให้นึกไปถึงภาวะสังคมล้มเหลว นั่นจึงทำให้เห็นได้ชัดว่านี่เป็นปัญหาที่ต้องได้รับการพูดถึงและแก้ไขให้เร็วที่สุดเท่าที่จะเป็นไปได้
โตชิบาได้พัฒนาหุ่นยนต์ขึ้นมาหลากหลายประเภทเพื่อตอบสนองความต้องการที่แตกต่างกันของอุตสาหกรรมการผลิต การจัดจำหน่าย และลอจิสติกส์ โดยในปีค.ศ.1967 หรือกว่าครึ่งศตวรรษที่แล้ว โตชิบาได้พัฒนา อุปกรณ์อ่านและจัดเรียงรหัสไปรษณีย์อัตโนมัติเครื่องแรกในโลก อุปกรณ์นี้ออกแบบมาให้รองรับระบบรหัสไปรษณีย์ที่จะนำมาใช้ในปีถัดไป นับเป็นการนำเครื่องจักรกลมาใช้แทนกระบวนการจัดเรียงจดหมายตามรหัสไปรษณีย์เบื้องต้นที่เคยทำด้วยมือมาเป็นเวลายาวนานและมีส่วนสนับสนุนการพัฒนาของญี่ปุ่นในช่วงที่เศรษฐกิจเติบโตเป็นอย่างมาก ซึ่งโตชิบายังคงมีส่วนแบ่งในตลาดนี้สูงมาจนถึงทุกวันนี้

เครื่องอ่านและจัดเรียงรหัสไปรษณีย์ที่เขียนด้วยลายมืออัตโนมัติเครื่องแรกในโลก เปิดตัวเมื่อปีค.ศ.1967 (พ.ศ.2510)
เครื่องอ่านและจัดเรียงรหัสไปรษณีย์นี้เป็นการนำเครื่องจักรมาใช้แทนแรงงานคนในกระบวนการที่แต่เดิมต้องใช้คนอ่านที่อยู่และจัดเรียงไปรษณีย์ด้วยมือ นับเป็นการเพิ่มประสิทธิภาพโดยรวมให้สูงขึ้น นอกจากนั้น เครื่องจักรนี้ยังทำงานได้เร็วกว่ามนุษย์และทำงานได้โดยแทบไม่ต้องหยุดพัก แต่ถึงกระนั้น สำหรับระบบการส่งไปรษณีย์โดยรวม อย่างการส่งไปรษณีย์ไปยังที่อยู่ที่ถูกต้องก็ยังคงต้องมีมนุษย์เป็นผู้ควบคุมอยู่
นอกจากนี้ หุ่นยนต์ยังถูกนำมาใช้ในลักษณะคล้าย ๆ กัน ในอุตสาหกรรมการผลิต การจัดจำหน่าย และลอจิสติกส์ เพื่อทำให้กระบวนการต่าง ๆ สามารถทำงานได้โดยอัตโนมัติ แต่เพราะเหตุใดเรายังคงพูดถึงเรื่อง “ลอจิสติกส์ล่มสลาย” อยู่อีก คำตอบก็คือ “โลจิสติกส์ล่มสลาย” ที่ว่านี้มีที่มาจากปัญหาการขาดแคลนแรงงานที่ทวีความรุนแรงขึ้นเรื่อย ๆ โดยตรง หรือพูดอีกอย่างก็คือ หากจะแก้ปัญหานี้ได้เราจำเป็นต้องนำเครื่องจักรกลเข้ามาใช้แทนที่ในกระบวนการที่เราไม่สามารถทำได้ในอดีต หรือกระบวนการที่เราเคยเชื่อว่าต้องทำโดยมนุษย์เท่านั้น
- จะเกิดอะไรขึ้นเมื่อหุ่นยนต์เข้ามาแย่งงานของมนุษย์
สิ่งหนึ่งที่หุ่นยนต์อุตสาหกรรมทำได้ดีก็คือ การทำกระบวนการเดิมซ้ำไปซ้ำมา แต่มันจะปรับตัวได้ช้าหากต้องปรับเปลี่ยนงานที่ทำไปตามสถานการณ์หรือสภาพแวดล้อมที่แตกต่างกัน เป็นเช่นนี้ก็เพราะ หุ่นยนต์ไม่ได้มีความสามารถแบบเดียวกับมนุษย์ แม้ว่ามันจะทำงานตามพารามิเตอร์ที่กำหนดไว้ได้ แต่มันกลับไม่สามารถเลือกใช้วิธีที่มีประสิทธิภาพสูงสุดได้เมื่อต้องเผชิญกับสถานการณ์ที่แตกต่างกันไปเรื่อย ๆ กล่าวคือ หุ่นยนต์ไม่สามารถทำงานที่ไม่คงที่ได้
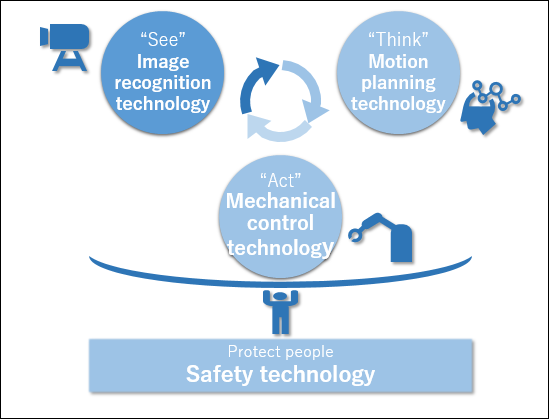
หากต้องการให้หุ่นยนต์ทำงานที่ไม่ได้มีความคงที่แน่นอนได้ เราต้องสร้างหุ่นยนต์อัจฉริยะที่สามารถ “มองเห็น” “คิด” และ “ลงมือปฏิบัติ” ได้
หากพูดให้เห็นภาพชัดขึ้นก็คือ หุ่นยนต์ต้องสามารถ “มองเห็น” ด้วยเทคโนโลยีการรับรู้ภาพ “คิด” ด้วยเทคโนโลยีวางแผนการเคลื่อนไหว และ “ลงมือปฏิบัติ” ด้วยเทคโนโลยีการควบคุม
ยิ่งไปกว่านั้น หุ่นยนต์เหล่านี้จะต้องทำงานใกล้ชิดกับมนุษย์ยิ่งกว่าที่เคยอีกด้วย ดังนั้น เทคโนโลยีที่ใช้ในหุ่นยนต์ทั้งหมดจะต้องมี เทคโนโลยีความปลอดภัย รองรับ เพื่อดูแลความปลอดภัยของมนุษย์ที่ต้องทำงานอยู่ใกล้ชิดกับหุ่นยนต์
มนุษย์ “อ่าน” สิ่งแวดล้อมรอบตัวอยู่ตลอดเวลาผ่านประสาทสัมผัสต่าง ๆ หากเราต้องการสร้างหุ่นยนต์ที่มีความตระหนักรู้สถานการณ์รอบตัวแบบเดียวกัน เราจำเป็นจะต้องใช้เทคโนโลยีการรับรู้ภาพขั้นสูง
ตัวอย่างเช่น หากเราต้องการให้หุ่นยนต์หยิบกล่องใบหนึ่งจากบรรดากล่องขนาดต่าง ๆ ที่วางระเกะระกะ เราต้องติดตั้ง เทคโนโลยีคัดแยกวัตถุ เพื่อให้หุ่นยนต์บอกได้อย่างแม่นยำว่ามีวัตถุประเภทใดอยู่ตรงหน้าบ้างและวัตถุเหล่านั้นวางอยู่อย่างไร ซึ่งในส่วนนี้ โตชิบา ถือเป็นผู้พัฒนาเทคโนโลยีคัดแยกวัตถุที่ได้รับการยอมรับว่ามีระดับความแม่นยำประเมินสูงที่สุดในโลก
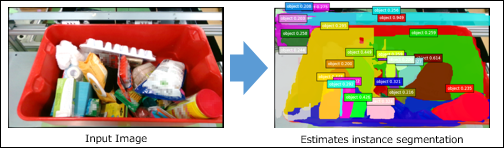
โตชิบาประสบความสำเร็จในการพัฒนาเทคโนโลยีคัดแยกวัตถุที่มีระดับความแม่นยำประเมินสูงที่สุดในโลก
ด้วยเทคโนโลยีการรับรู้ภาพนี้ หุ่นยนต์จะได้รับข้อมูลที่ต้องการเพื่อ “ลงมือปฏิบัติ” โดยใช้เทคโนโลยีการควบคุม
หุ่นยนต์ในปัจจุบันสามารถ “เดินตามรอย” (รับรู้) สัญลักษณ์บอกตำแหน่งที่วาดไว้บนราง หรือพื้นเพื่อให้เคลื่อนที่ได้อย่างแม่นยำ ซึ่งเทคโนโลยีการรับรู้ภาพนี้จะทำให้หุ่นยนต์สามารถเทียบตำแหน่งปัจจุบันของมันกับตำแหน่งฐาน และคาดคะเนตำแหน่งปัจจุบันของตนเองได้ ทำให้หุ่นยนต์สามารถเคลื่อนไหวได้โดยอิสระและแม่นยำแม้ในพื้นที่ที่ไม่มีรางหรือสัญลักษณ์บอกตำแหน่ง นับว่าเป็นฟังก์ชันที่สำคัญมากที่จะช่วยให้หุ่นยนต์สามารถระบุเส้นทางที่ดีที่สุดในการเคลื่อนที่ไปยังจุดหมายปลายทางด้วยตนเอง ในแง่นี้เราอาจจะพูดได้ว่า เทคโนโลยีการรับรู้ภาพพยายามทำหน้าที่เสมือนดวงตาของมนุษย์ให้กับหุ่นยนต์
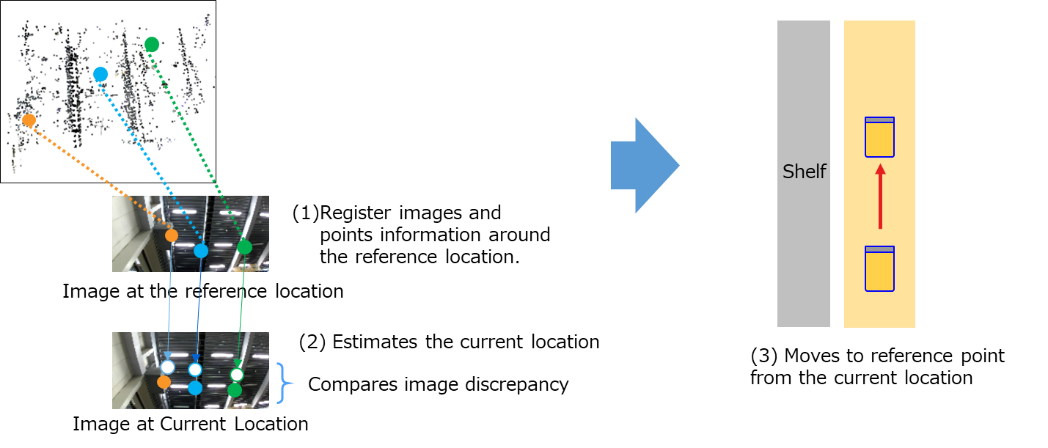
หุ่นยนต์สามารถคาดคะเนตำแหน่งของตนเองได้ด้วยเทคโนโลยีการรับรู้ภาพ โดยนำภาพที่ “มองเห็น” มาใช้คาดคะเนตำแหน่งของตนเอง ทำให้ไม่จำเป็นต้องใช้รางหรือสัญลักษณ์บอกตำแหน่ง
ส่วนเป้าหมายของเทคโนโลยีวางแผนการเคลื่อนไหวคือช่วยให้หุ่นยนต์สามารถนำข้อมูลที่ได้รับจากเทคโนโลยีการรับรู้ภาพมาใช้ในการ “คิด” แล้ว “ลงมือปฏิบัติ” ด้วยตนเอง อย่างเวลาที่มนุษย์เราเอื้อมมือไปหยิบอะไรสักอย่างจากกล่อง เราต้องคิดว่าของสิ่งนั้นอยู่ตรงไหน ขนาดใหญ่แค่ไหน หนักแค่ไหน และเราจะควบคุมมืออย่างไรให้หยิบของสิ่งนั้นได้โดยที่มือของเราไม่ไปชนเข้ากับวัตถุอื่นหรือด้านในของกล่อง
ในทำนองเดียวกัน หุ่นยนต์ก็ต้องวางแผนการเคลื่อนไหว เช่น จะขยับแขนกลอย่างไร หรือจะสามารถหยิบวัตถุนั้น ๆ ได้โดยไม่สร้างความเสียหายต่อสิ่งอื่นได้หรือไม่ จนถึงบัดนี้ มนุษย์เป็นผู้ตัดสินใจเรื่องเหล่านี้ให้กับหุ่นยนต์ แต่เป้าหมายของเทคโนโลยีวางแผนการเคลื่อนไหวคือทำให้หุ่นยนต์สามารถ “คิด” ได้ด้วยตนเองโดยอาศัยข้อมูลที่ได้รับ รวมถึงสามารถวางแผนได้ด้วยตนเอง การที่หุ่นยนต์จะสามารถวางแผนการเคลื่อนไหวที่เหมาะสมที่สุดได้นั้น จำเป็นจะต้องนำข้อมูลที่ได้จากเทคโนโลยีการรับรู้ภาพมาสร้างชุดสถานการณ์จำลองด้วยแบบจำลองคอมพิวเตอร์ และจึงสร้างแผนที่พิจารณาแล้วว่าเป็นแผนที่ดีที่สุด
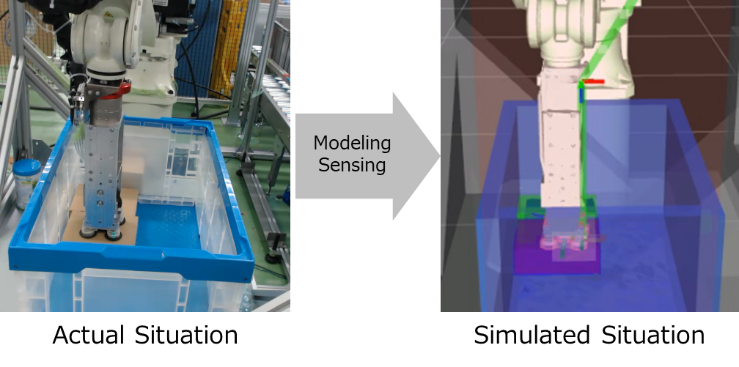
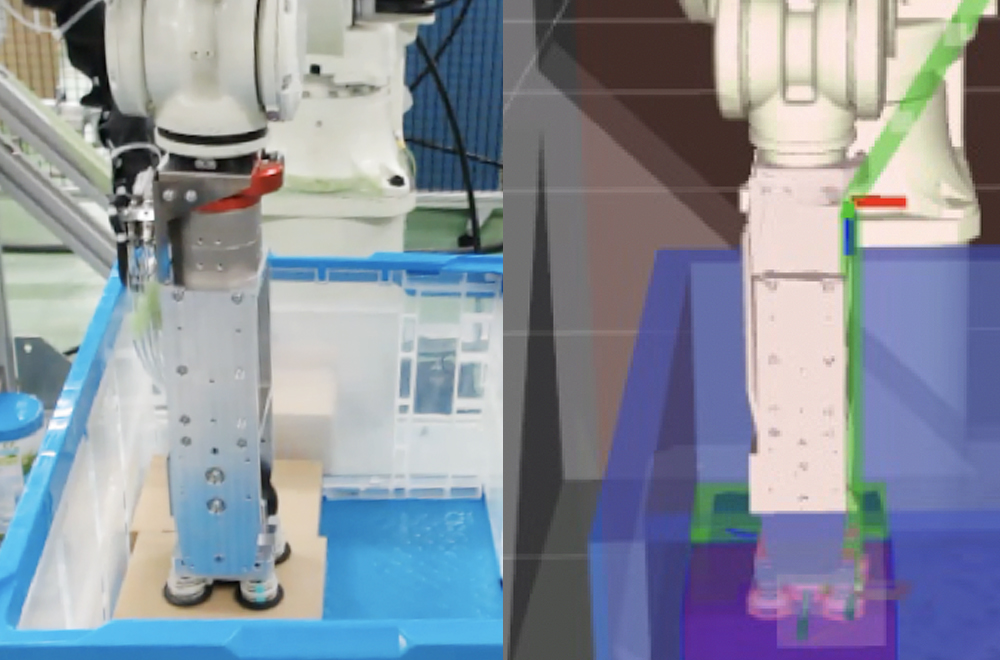
เมื่อสร้างแผนการเคลื่อนไหวเสร็จแล้ว ขั้นต่อไปคือ “ลงมือปฏิบัติ” ตามแผนดังกล่าว ซึ่งเป็นขั้นที่ต้องอาศัยเทคโนโลยีการควบคุม หากเทียบกับมนุษย์แล้วก็คือความสามารถในการเคลื่อนที่ได้อย่างมีความชำนาญ
โตชิบา เชื่อว่าแขนกลต้องทำได้มากกว่าแค่ขยับตามที่แบบจำลองกำหนด จึงจะเรียกได้ว่าสามารถเคลื่อนไหวได้อย่างชำนาญ
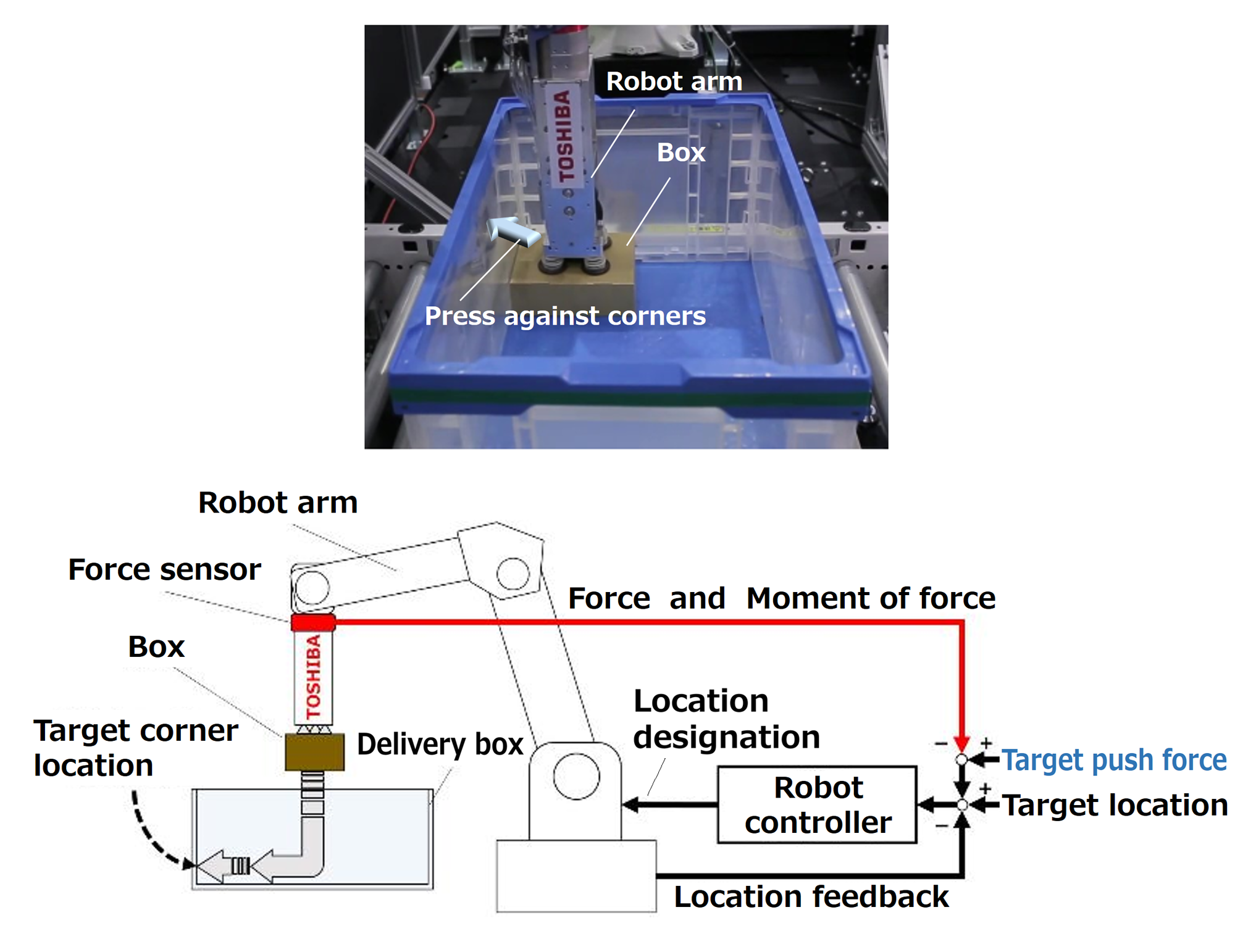
ตัวอย่างเช่น เวลาที่เราจะวางกล่องใบหนึ่งลงในตู้คอนเทนเนอร์ มนุษย์เรามักจะวางกล่องไว้ใกล้กับริมสุดของตู้คอนเทนเนอร์ ซึ่งในการจะทำเช่นนี้ได้ เราจะตรวจสอบดูก่อนว่าริมขอบของตู้คอนเทนเนอร์นั้นอยู่ตรงไหน แล้วจึงวางกล่องลงในบริเวณนั้น จากนั้นจึงค่อยขยับกล่องให้ชิด “ผนัง” ด้านในของตู้คอนเทนเนอร์ และปล่อยมือเมื่อรู้สึกได้ว่ากล่องสัมผัสกับผนังแล้ว และทราบแล้วว่ากล่องวางชิดริมด้านในของตู้คอนเทนเนอร์นั้นแล้ว งานที่มนุษย์ทำได้อย่างเป็นธรรมชาติลักษณะนี้คือ สิ่งที่แขนกลจำเป็นต้องมีเทคโนโลยีมาช่วยจึงจะสามารถทำได้อย่างชำนาญ
พูดอีกอย่างก็คือ ในการที่จะเคลื่อนที่ได้อย่างมีความชำนาญนั้น หุ่นยนต์ต้องสามารถตรวจจับได้ว่ากล่องและผนังตู้คอนเทนเนอร์สัมผัสกันแล้วโดยใช้เซนเซอร์รับรู้แรงที่ติดอยู่ที่แขนกล
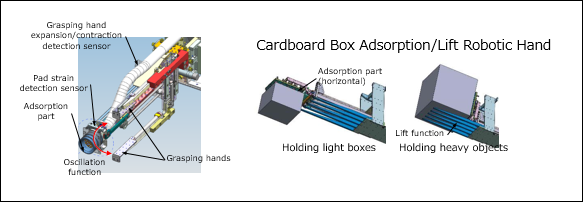
นอกจากนั้น เราต้องไม่ลืมด้วยว่ากล่องมีขนาดและรูปร่างหลากหลายแตกต่างกัน และอาจวางซ้อนกันอย่างไม่เป็นระเบียบ เอียงไปทางด้านใดด้านหนึ่ง บางใบอาจจะเบา แต่บางใบอาจจะหนัก ความแตกต่างเหล่านี้มนุษย์สามารถบอกได้และจัดการได้อย่างง่ายดาย เพราะเรารู้ว่าถ้ากล่องเอียงไปฝั่งหนึ่งต้องถืออย่างไรและเมื่อยกของหนักต้องทำท่าอย่างไร ดังนั้น โตชิบา จึงพัฒนามือกลกับสิ่งที่เรียกว่า ส่วนยึดจับไฮบริด ซึ่งช่วยให้มือกลสามารถหยิบจับกล่องรูปแบบต่าง ๆ ได้ด้วยทักษะเช่นเดียวกับมนุษย์
-
หุ่นยนต์กับความปลอดภัย?
หุ่นยนต์อัจฉริยะหรือหุ่นยนต์ที่สามารถเคลื่อนไหวอย่างมีทักษะในลักษณะที่กล่าวไปแล้วได้ถูกพัฒนาขึ้นเนื่องมาจากปัญหาการขาดแคลนแรงงาน ดังที่ได้กล่าวไปข้างต้น ซึ่งทำให้เราจำเป็นต้องนำหุ่นยนต์มาใช้ในกระบวนการทำงานที่เราเคยคิดว่าต้องทำโดยมนุษย์เท่านั้น แต่การนำหุ่นยนต์มาแทนที่มนุษย์ในลักษณะนี้มีความท้าทายที่สำคัญมากอยู่ประการหนึ่ง นั่นก็คือ เราจะรับประกันความปลอดภัยได้อย่างไร
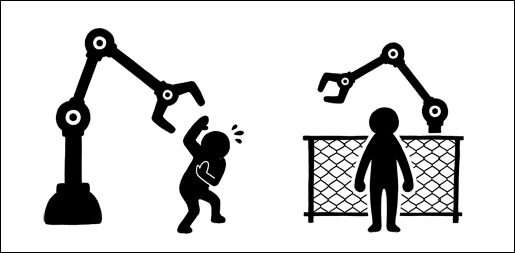
การให้มนุษย์กับหุ่นยนต์ทำงานร่วมกันอย่างใกล้ชิดเพิ่มความเสี่ยงในการเกิดอุบัติเหตุ ดังนั้น จึงต้องมีการจัดการที่เข้มงวดเพื่อดูแลความปลอดภัยของมนุษย์ เช่น แยกพื้นที่ทำงานของหุ่นยนต์และมนุษย์ออกจากกัน
ในอนาคต หุ่นยนต์จะเข้ามาทำงานบางประเภทที่มนุษย์เคยทำ ซึ่งในบางกรณีหมายถึงงานที่มนุษย์เคยยืนทำอยู่ข้าง ๆ กันด้วย ดังนั้น มนุษย์จะต้องทำงานใกล้ชิดกับหุ่นยนต์มากกว่าที่เคย แต่อย่างไรก็ตาม เวลามนุษย์เดินชนหรือสัมผัสกัน มันไม่ค่อยอันตรายเท่าไร แต่การชน หรือกระแทกเข้ากับหุ่นยนต์อาจนำไปสู่อุบัติเหตุร้ายแรงได้ ดังนั้น เราจึงต้องมีเทคโนโลยีความปลอดภัยที่สอดคล้องตามแนวปฏิบัติอย่าง ISO13849-1 เพื่อปกป้องมนุษย์ให้ปลอดภัยจากหุ่นยนต์
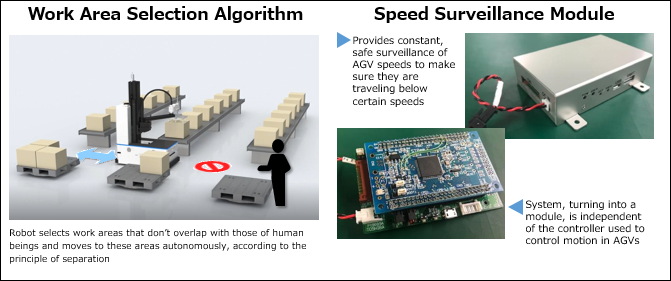
เทคโนโลยีความปลอดภัยมีหลักการพื้นฐานอยู่หลายประการ ประการหนึ่งคือหลักการแยกมนุษย์และหุ่นยนต์ออกจากกัน ซึ่งสนับสนุนให้แยกพื้นที่การทำงานของหุ่นยนต์และมนุษย์ออกจากกัน เพื่อไม่ให้มีพื้นที่ทับซ้อน แต่เนื่องจากหุ่นยนต์เริ่มถูกนำเข้ามาใช้ทำงานแทนมนุษย์มากขึ้นเรื่อย ๆ การเกิดพื้นที่ทับซ้อนจึงดูเป็นเรื่องยากที่จะเลี่ยงได้
โตชิบา ใช้อัลกอริทึมเลือกพื้นที่ทำงานเพื่อพัฒนาระบบที่หุ่นยนต์สามารถเลือกพื้นที่ทำงานที่ไม่ทับซ้อนกับพื้นที่ของมนุษย์ได้ และเคลื่อนย้ายตนเองไปยังพื้นที่นั้นได้โดยอัตโนมัติเพื่อให้มนุษย์มีความปลอดภัย
นอกจากนั้น ยังได้ติดตั้งอุปกรณ์ตรวจจับความเร็วที่แยกออกมาต่างหากในรถเอจีวี (Automated Guided Vehicles – พาหนะเคลื่อนที่อัตโนมัติ) นอกเหนือจากตัวควบคุมการเคลื่อนที่ที่มีอยู่แล้ว เพื่อช่วยสอดส่องตัวรถตลอดเวลาและให้มั่นใจว่ารถเอจีวีกำลังเคลื่อนที่ด้วยความเร็วไม่เกินที่กำหนดไว้
โตชิบาเชื่อว่าเทคโนโลยีทั้งหมดที่ประกอบขึ้นเป็นหุ่นยนต์ควรตั้งอยู่บนพื้นฐานความปลอดภัยของมนุษย์ ด้วยเหตุนี้ จึงเชื่อว่าสิ่งสำคัญที่สุดควรเป็นการป้องกันความเป็นไปได้ที่จะเกิดอุบัติการณ์ต่าง ๆ ตั้งแต่การพัฒนาหุ่นยนต์ในขั้นแรก
ใน “ตอนที่ 2: การประยุกต์ใช้” เราจะอธิบายว่า โตชิบานำเทคโนโลยีหุ่นยนต์เหล่านี้ไปใช้เพื่อพัฒนาโซลูชันให้แก่อุตสาหกรรมการผลิต การจัดจำหน่าย และโลจิสติกส์อย่างไรบ้าง